October 07, 2020
Ethernet Advanced Features for Automotive Applications
By
Amir Bar-Niv, VP of Marketing, Automotive Business Unit, Marvell
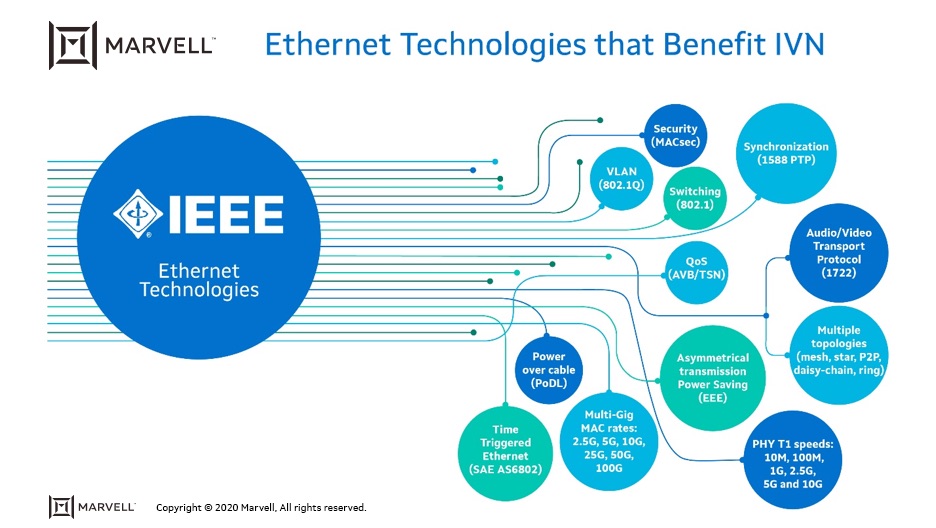
Ethernet standards comprise a long list of features and solutions that have been developed over the years to resolve real network needs as well as resolve security threats. Now, developers of Ethernet In-Vehicle-Networks (IVN) can easily balance between functionality and cost by choosing the specific features they would like to have in their car’s network.
The roots of Ethernet technology began in 1973, when Bob Metcalfe, a researcher at Xerox Research Center (who later founded 3COM), wrote a memo entitled “Alto Ethernet,” which described how to connect computers over short-distance copper cable. With the explosion of PC-based Local Area Networks (LAN) in businesses and corporations in the 1980s, the growth of client/server LAN architectures continued, and Ethernet started to become the connectivity technology of choice for these networks. However, the Ethernet advancement that made it the most successful networking technology ever was when standardization efforts began for it under the IEEE 802.3 group.
The 10 Mb/s derivative of Ethernet was first approved by the IEEE Standards Board in 1983, and subsequently published in 1985 as IEEE Std 802.3-1985. The process of standardization of Ethernet, and the subsequent membership in IEEE 802 standards, has been extremely beneficial to Ethernet’s growth, enabling multi-vendor support and interoperability as a wide variety of physical layers have been added. Since the original Ethernet standard began, data rates from 1 Mb/s to 400 Gb/s have been added on a wide variety of media and reaches (cable lengths), all under a seamless architecture in IEEE 802.
Recently, IEEE 802.3 added automotive reaches and rates to its application base, enabling lightweight, high-speed single-pair connectivity for automobiles. Building on the already mature base of LAN technologies in the IT space, automotive networks have rapidly scaled to include speeds from 10 Mb/s to 10 Gb/s and are currently working on reaching speeds beyond 10 Gb/s. These networks are expected to fulfill a variety of applications currently served by mixed networks with proprietary protocols.
1) Switching
The essence of a network is addressing and switching – the capability to send data between specific nodes that share the same network. One of the most important attributes of Ethernet network/switching is the capability to send the traffic between two nodes over different routes in the network.
Addressing devices and switching through multiple routes provides redundancy that is critical for the functionality and reliability of the IVN. The switching architecture of the Ethernet LAN is based on the IEEE 802.1 standard. It defines the link security, overall network management, and the higher protocol layers above the Media Access Control (MAC).
Ethernet switching naturally creates another very important benefit for the IVN: the ability to support a wide range of network topologies including mesh, star, ring, daisy-chain, tree and bus (as shown in Figure 2). This allows system and domain developers to choose the optimal topology for each domain, while leveraging the same basic components.
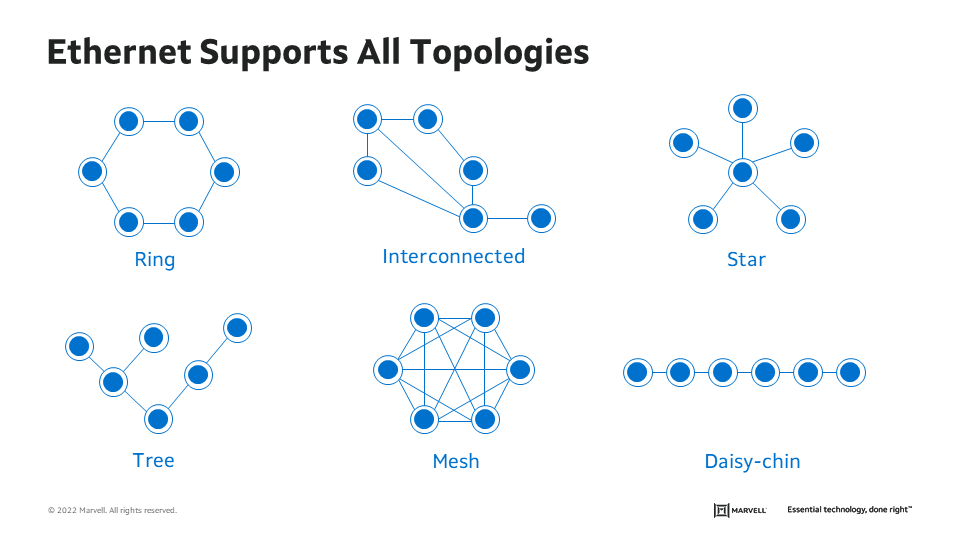
Figure 2
The payload size of data packets sent over Ethernet is variable, allowing maximum flexibility for carrying different types of application loads. In addition, Ethernet’s native support of broadcast and multicast allows high efficiency, with low latency for each of these topologies.
2) Ethernet PHY Speeds
The first IEEE standard Automotive Ethernet PHY published was the 100BASE-T1 that was developed under 802.3bw. This standard was ratified in 2015, and specified 100Mbps Ethernet on single-pair, unshielded automotive cable. Today, 100BASE-T1 has been adopted by many original equipment manufacturers (OEMs), and most luxury and mid-end cars use 100M Ethernet networking.
100BASE-T1 specifications were not alone for long, and in 2016, the next generation of automotive Ethernet, 1000BASE-T1, was published. Developed simultaneously with 100BASE-T1, the 1000BASE-T1 PHY specification known as 802.3b provided gigabit networking. The 1000BASE-T1 PHY products were introduced to the market in 2017 and are now getting into mass production.
In 2019 and 2020, Automotive Ethernet added both lower speeds (10 Mb/s) and multigigabit speeds. The latest Automotive Ethernet PHY standard development for 2.5 Gbps, 5 Gbps, and 10Gbps, called IEEE 802.3ch, was completed in early 2020.
Currently, Automotive Ethernet PHY standards are in progress for speeds higher than 10Gbps. The first effort to develop a pre-standard set of specifications is done in the NAV (Networking for Autonomous Vehicles) Alliance(www.nav-alliance.org), under Technical Working Group 1 (TWG1). In addition, a new task force, called IEEE 802.3cy for “Greater than 10 Gb/s Automotive Ethernet Electrical PHYs” began its activities in July 2020, with an objective to develop an automotive PHY for data rates of 25 Gbps, 50 Gbps and 100 Gbps.
3) Ethernet MAC speeds
IEEE 802.3 developed standards for MAC at rates ranging from 10Mbps all the way up to 100Gbps (200Gbps and 400Gbps were also developed, but these rates today require multiple channels of 100Gbps). These standards had previously been developed and proven for LAN and data center applications, and today they also find applications in automotive networking.
Specifically, Ethernet supports rates of 10Mbps, 100Mbps, 1Gbps, 2.5Gbps, 5Gbps, 10Gbps, 25Gbps, 50Gbps and 100Gbps. These MAC rates open the door for future automotive network speeds beyond 10Gbps, for high speed backbone.
4) Asymmetrical Ethernet
Automotive Ethernet is capable of symmetric traffic rates, meaning it transports data at the same speed in both directions on a single-pair automotive cable. This capability makes it the preferred technology for the network backbone. However, Ethernet can also operate in an asymmetrical mode when needed. In 2009, the Ethernet standards group developed a set of protocols for efficiently handling asymmetric and time-varying traffic loads known as Energy Efficient Ethernet (EEE).
EEE provides a method to reduce power consumption during periods of low data activity. In its normal mode of operation, an Ethernet link consumes power in both directions, even when a link is idle and no data is being transmitted. Based on the IEEE 802.3az standard, EEE uses a Low Power Idle (LPI) mode to reduce the energy consumption of a link when no packets/data are being sent.
The standard specifies a signaling protocol to achieve power saving during idle time by exchanging LPI indications to signal the transition to low-power mode when there is no traffic. LPI indicates when a link can go idle, and when the link needs to resume after a predefined delay.
The asymmetrical mode is useful for camera and sensors links. On these links, data (video) is sent at high speed (multi gigabits per second) from the camera to the SoC/GPU. On the other direction (from SoC to camera), there are only control signals that need to be sent at much lower speeds (megabit per second) – these can leverage the EEE mode for power saving.
The 100BASE-T1 automotive Ethernet PHY did not specify a low-power mode, and it was added in 1000BASE-T1. As it became clear that supporting energy efficient asymmetric traffic would be important in the automotive networking world, 2.5G, 5G, and 10Gb/s Ethernet improved the concepts of energy efficiency in 802.3ch by allowing a slow wake. This mode works with a longer delay to re-establish traffic, and is especially useful on asymmetric links.
5) Virtual Local Area Network (VLAN)
VLANs work by applying identifiers (known as 802.1Q tags) to network packets and handling these tags at switching nodes, creating the appearance and functionality of network traffic that is physically on a single network but that acts as if it is split between separate networks. This way, VLANs keep traffic from different applications separate, despite being connected to the same physical network. VLANs also allow grouping of nodes and data sources together, even if they are not directly connected to the same switch. Because VLANs can be easily configured, system design and data source deployment are greatly simplified. In Automotive, VLAN is used to isolate traffic from different applications or domains, and can route video from different sources over the same physical link and/or isolate traffic that requires higher priority.
VLAN traffic can be routed, multicast and broadcast. In addition, VLANs also support Quality of Service and traffic prioritization using the 802.1P standard, allowing for efficient bandwidth utilization, which can be utilized in advanced IVN.
6) Precision Time Protocol
The vision analysis algorithm in a car requires either simultaneous sampling of multiple sensors or knowing the time that a measurement was taken. As these measurements are taken by different sensors and cameras, and carried through different routes, (cables, repeaters, hubs and switches), time synchronization needs to be done between all the nodes in the car down to very short intervals.
The IEEE 802.1AS (Timing and Synchronization for Time-Sensitive Applications in Bridged Local Area Networks) standard allows for synchronization of timing. This standard leverages the IEEE 1588 v2 and uses a special profile called “PTP Profile” to select the best clock source in the system as the master clock for all nodes. Additionally, clock redundancy and rapid failover is easily supported using these protocols.
7) Audio Video Bridging (AVB/TSN)
Audio Video Bridging (AVB) is a method to transport audio and video (AV) streams over Ethernet-based networks, to ensure the highest Quality-of-Service (QoS). QoS guarantees the ability to dependably run high-priority applications and traffic on a network with a limited capacity. This is handled by the 802.1 suite of standards originally known as AVB, and now known as Time Sensitive Networking (TSN). The Advance Driver Assistance Systems (ADAS) rely on AVB to get data from cameras and sensors in a timely manner at a low, controlled latency with guaranteed bandwidth. The IEEE 802.1 AVB Task Group is working on standards to meet these requirements, including 802.1Qat Stream Reservation, as well as 802.1Qav Queuing and Forwarding for AV Bridges.
AVB IEEE standards define signaling, transport, and synchronization of the audio and video streams. In essence, AVB works by reserving a fraction of the available Ethernet bandwidth for AVB traffic. Its main attributes for Ethernet networks include:
- Precise timing of streaming in conjunction with PTP. Support of low-jitter media clocks and accurate synchronization of multiple streams.
- A reservation protocol that enables the endpoint device to notify the various network elements to reserve resources necessary to support its stream.
- Queuing-and-forwarding defined rules to ensure that an AV stream will pass through the network within the delay specified in the reservation.
In November 2012, AVB was renamed “Time-Sensitive Networking Task Group” (TSN), which is an enhancement of AVB that added specifications to expand the range, functionality and applications of the standard.
The TSN suite of standards also rely on IEEE standards outside of the 802 family, such as IEEE 1722. IEEE 1722 – Layer 2 Audio/Video Transport Protocol (AVTP) for Time Sensitive Applications in a Bridged Local Area Network - sets the presentation time (time-stamping) for each AV stream and manages latencies.
The AVnu Alliance(www.avnu.org ) is an industry forum dedicated to the advancement of AV transport through the adoption of IEEE 802.1 AVB/TSN and the related IEEE 1722 standard. The Alliance is used by most OEM and Tier-1 companies to define a complete Ethernet-based solution for audio and video in IVNs.
8) MAC-PHY Security
Media Access Control Security (MACSec) is an 802.1AE IEEE industry standard security technology that secures data transmissions over Ethernet networks. MACSec is used for authentication, encryption and validation of the integrity of packets that are sent between peer nodes and provides point-to-point security on Ethernet links.
MACSec is capable of identifying and preventing security threats, such as intrusion, man-in-the-middle, masquerading, passive wiretapping and playback attacks in the IVN.
Additionally, an Ethernet MACSec root node can be used as the security center for all domains in the car, including lower-speed CAN, LIN, USB, and others. This can be achieved by using one or more trunking ports from an Ethernet switch to an Ethernet supporting gateway, bridging those legacy networks.
9) Power Over Cable
One great advantage of copper-cabled Ethernet for automotive networking is the ability to deliver power over the same wires as data, which in turn saves weight in the vehicle. This is especially important in the case of cameras and sensors that are mounted all around the vehicle.
The IEEE 802.3bu standard, which was ratified in 2016, defines specifications and parameters for adding standardized power to single-pair cabling. The standard defines a power delivery protocol that supports multiple voltages and classes of power delivery for each voltage. It includes assured fault protection and detection capabilities for identifying device signatures, as well as direct communication with devices to determine accurate and safe power delivery. Total power delivery over the automotive cable ranges from 0.5W up to 50W.
Marvell’s automotive Ethernet products roadmap for IVN includes the most comprehensive set of solutions in the market, which enable our customers to build vehicle networks for low, mid and high-end cars, all the way to fully autonomous cars. This roadmap includes a broad range of switches, PHYs, controllers and bridges (at Ethernet speeds from 10Mbps up to 10Gbps and higher), advanced security features, and the support for the latest industry requirements for AVB/TSN features in IVN.
The latest addition to the Marvell Ethernet PHY roadmap is the 88Q2220 and 88Q2221, the first 1000BASE-T1 Automotive PHY family of products for secured network, with the support of IEEE 802.1AE MACSec. In addition, these ultra-low power Gigabit PHY products support the latest TC10 standard of OPEN Alliance for 1000BASE-T1 Sleep and Wake-up modes.
In our next blog, we will discuss Ethernet QoS for IVN, the related standards and features, as well as the AvNU certification of Marvell Automotive Switch products.
Tags: 1000BASE-T1, 100BASE-T1, 88Q2220 and 88Q2221, Audio video bridging, Automotive, Automotive Ethernet, Automotive Ethernet PHY, Automotive Switch, Autonomous drive, IEEE standard, In-vehicle networking, IVN, MACsec, Media Access Control, Security, TC10, VLAN
Recent Posts
- Sustainable Computing With CXL: How Marvell Structera X Can Help Eliminate Waste, Expand Capacity, Lower Emissions
- Inside Marvell’s Expanding Custom Silicon Opportunity
- Welcome to the “OFC Film Festival”
- Canada’s Role in the AI Revolution
- Auto-Load Balancing and Teralynx 10: Optimizing Cloud and AI Infrastructure