November 17, 2022
The Right Stuff: A Past and Future History of Automotive Connectivity
By
Amir Bar-Niv, VP of Marketing, Automotive Business Unit, Marvell and Mark Davis, Senior Director, Solutions Marketing, Marvell
In the blog, Back to the Future – Automotive network run at speed of 10Gbps, we discussed the benefits and advantages of zonal architecture and why OEMs are adopting it for their next-generation vehicles. One of the biggest advantages of zonal architecture is its ability to reduce the complexity, cost and weight of the cable harness. In another blog, Ethernet Camera Bridge for Software-Defined Vehicles, we discussed the software-defined vehicle, and how using Ethernet from end-to-end helps to make that vehicle a reality.
While in the near future most devices in the car will be connected through zonal switches, cameras are the exception. They will continue to connect to processors over point-to-point protocol (P2PP) links using proprietary networking protocols such as low-voltage differential signaling (LVDS), Maxim’s GMSL or TI’s FPD-Link.
An obvious question arises: if most of the in-car devices will be connected over Automotive Ethernet, why did OEMs adopt proprietary technologies for the camera interface? The answer is related to the history of automotive in-vehicle networks and the evolution of Automotive Ethernet PHY.
So, a little history.
(If you prefer to skip the history and jump right to present day, click here , or scroll down to “The Need for Speed.”)
1986: Cars CAN do better
By the early 1980s, new automotive design requirements had outstripped the capabilities of traditional, hard-wired electronics. Engineers at Robert Bosch Gmbh undertook the development of a new serial bus system that would enable electronic control units (ECUs) and subsystems to communicate with one another, allowing for the introduction of new features via software.
Engineers from Bosch, academia and industry introduced the Controller Area Network (CAN) protocol in 1986; that was quickly followed by the introduction of the first CAN controller semiconductor chips by Intel and Philips, in 1987.
Daimler was the first to introduce CAN, in 1992, and the CAN bus, as it’s known, has achieved near-universal usage and is one of five protocols used in the on-board diagnostics (OBD)-II vehicle diagnostics standard, which has been mandatory for all cars and light trucks sold in the United States since 1996.
For all its capabilities and robustness, CAN bus came to be viewed by the auto manufacturers as too expensive to implement for every component in the car.
2002: LIN, or, there must be a cheaper way
To reduce CAN-driven networking costs for components that did not require CAN bus capabilities, namely comfort functions like power windows, electric sunroofs and air conditioning control, European car manufacturers began to make use of different serial communication technologies, which led to compatibility problems. This spawned the development of the serial-network protocol LIN (Local Interconnect Network).
The LIN Consortium, founded in 1998, introduced the new LIN specification in 2002, followed by a 2.0 version in 2003.
The LIN bus is an inexpensive serial communications protocol that serves as a good alternative to CAN bus wherever low cost is essential, requirements are few, and speed/bandwidth is not important. Typically, it is used within sub-systems that are not critical to vehicle performance or safety. As such, it complements the CAN network, yielding a hierarchical in-car network.
LIN bus remains in common usage for mechatronics nodes such as wipers, turn signals, seat motors, mirrors and door locks.
1998: How to get the MOST out of your car stereo
By the time Janet Jackson hit the charts, again, with Together Again in 1998, the auto industry was overdue for a multimedia networking standard, as audio CDs were replacing analog storage and consumer interest in navigation and mobile phones was on the rise. In that year, the MOST Cooperation set out to define and adopt a common multimedia network protocol. As a result of their efforts, MOST (Media Oriented Systems Transport) technology has emerged as a global standard for implementing multimedia networking in automobiles.
The serial MOST bus uses synchronous data communication to transport audio, video, voice and data signals via plastic optical fiber (POF) or electrical conductor and is used in almost every car brand worldwide. In its initial implementation, MOST25, it could support up to 15 uncompressed stereo audio channels with CD-quality sound. BMW first introduced MOST25, using optical transmission, in 2001.
MOST150, introduced in 2007, includes advanced functions and enhanced bandwidth that enables a multiplex network infrastructure capable of transmitting all forms of infotainment data, including video, throughout an automobile. Audi was the first to deploy MOST150 using optical transmission in 2012, followed by Honda’s introduction using coaxial transmission.
MOST has achieved widespread use, though its importance is diminishing as higher bandwidth infotainment demands throughout the vehicle multiply.
2000: FlexRay takes on the 21st century vehicle
As auto makers continued to raise the bar on safety, comfort, performance and environmental impact, they began to develop interest in “X-by-wire” applications, in which functions would be purely electrical, with no mechanical fallback, with advanced control and safety systems being obvious targets.
The FlexRay Consortium set out to develop a high-bandwidth, fault-tolerant automotive network communications protocol for use in these high-end applications. It did exactly that, with a protocol that features 10 Mbit/s data rates (as compared to 1 Mbit/s for CAN) and higher fault tolerance potential than CAN, thanks to two available independent data channels. It also included numerous features required for reliable high-speed control applications.
As one might expect, the FlexRay protocol is more expensive to implement than CAN; as such, it operates as part of a protocol hierarchy and has been widely used for high-performance powertrain and safety applications such as drive-by-wire, active suspension and adaptive cruise control.
Following the finalization of FlexRay 3.0, the FlexRay Consortium considered its job done and disbanded in 2009. The FlexRay protocol is now memorialized in a set of ISO standards (ISO 17458-1 to ISO 17458-5).
Although FlexRay is in widespread use, some vehicle manufacturers have opted for other in-vehicle networking technologies that fulfill the same timing requirements.
Ethernet
Ethernet found its way into the automobile in an unusual way. In 2004, BMW decided to introduce for model year 2008 a central gateway ECU that would function as the single diagnostic and programming interface to the outside world. An external tester was to flash, via the OBD connector, every one of dozens of ECUs in the vehicle with the latest software.
The problem? Each update would require flashing a one-gigabyte file. Using their preferred high-speed CAN (HS CAN) protocol, this process would take 16 hours. That was obviously unsuitable for both factory floor and dealership, for which a 15-minute upload time was necessary. A new approach was required.
Everything was on the table—MOST, FlexRay, USB, FireWire—but none sufficed. The answer, as it turned out, was 100BASE-TX Ethernet.
While Ethernet was ready for use in near off-the-shelf form for BMW’s original software-upload application, other applications used when the vehicle was running required modifications to accommodate electromagnetic emissions while still making use of unshielded cable. The OPEN Alliance was formed to address this; and the result was the first Automotive Ethernet standard: 100BASE-T1, or IEEE 802.3bw.
BMW first introduced 100 Mbps Ethernet in 2014, as part of the Surround View System (SVS) in the 7-series. Other applications quickly followed, beginning with the infotainment domain, where it displaced MOST.
Additional Automotive Ethernet standards followed; beginning with 1000BASE-T1 (1 Gbps), all are developed under the auspices of the IEEE. The IEEE has developed new standards for 2.5, 5 and 10 Gbps Automotive Ethernet. At a 10 Gbps data rate, Ethernet can deliver uncompressed video from the camera, a critical capability for autonomous driving.
The latest standard for 25 Gbps Automotive Ethernet (802.3cy) is expected to be finalized by mid-2023; and will be able to support the future resolutions and speeds of automotive cameras.
The Need for Speed
The first camera in a production vehicle car was mounted on the rear spoiler of the Japanese-market-only 1991 Toyota Soarer. It would be another 11 years before a vehicle with rear-view camera technology was available in the U.S.—in the 2002 Infiniti Q45 sedan. These were analog cameras that use analog signals to transfer low resolution images from the CCD sensor to a dashboard screen.
The next major step was high-definition digital automotive cameras that were first introduced in the mid-2010s into rearview mirrors to reduce the number of blind spots for drivers maneuvering their cars in reverse. The data speeds for these and other outward-facing cameras started at 700 Mbps and quickly exceeded 1 Gbps.
As shown in the table below, Automotive Ethernet PHY could not support camera link speed requirements. These requirements were met instead by proprietary technologies like Texas Instruments’ Flat Panel Display Link (FPD-Link)—which is based on LVDS technology and, later, Maxim’s Gigabit Multimedia Serial Link (GMSL). TI’s technology first saw widespread use in 2006 in the form of FPD-Link II, which transmitted compressed video at speeds of approximately 1 Gbps. Today, FPD-Link III supports speeds of 6 Gbps, and TI is sampling even higher-speed devices.

The figure below shows the evolution of in-vehicle network data rates, including the latest Automotive Ethernet developments, as well as the progress of the LVDS technologies.

Automotive Ethernet Can Reach Escape Velocity
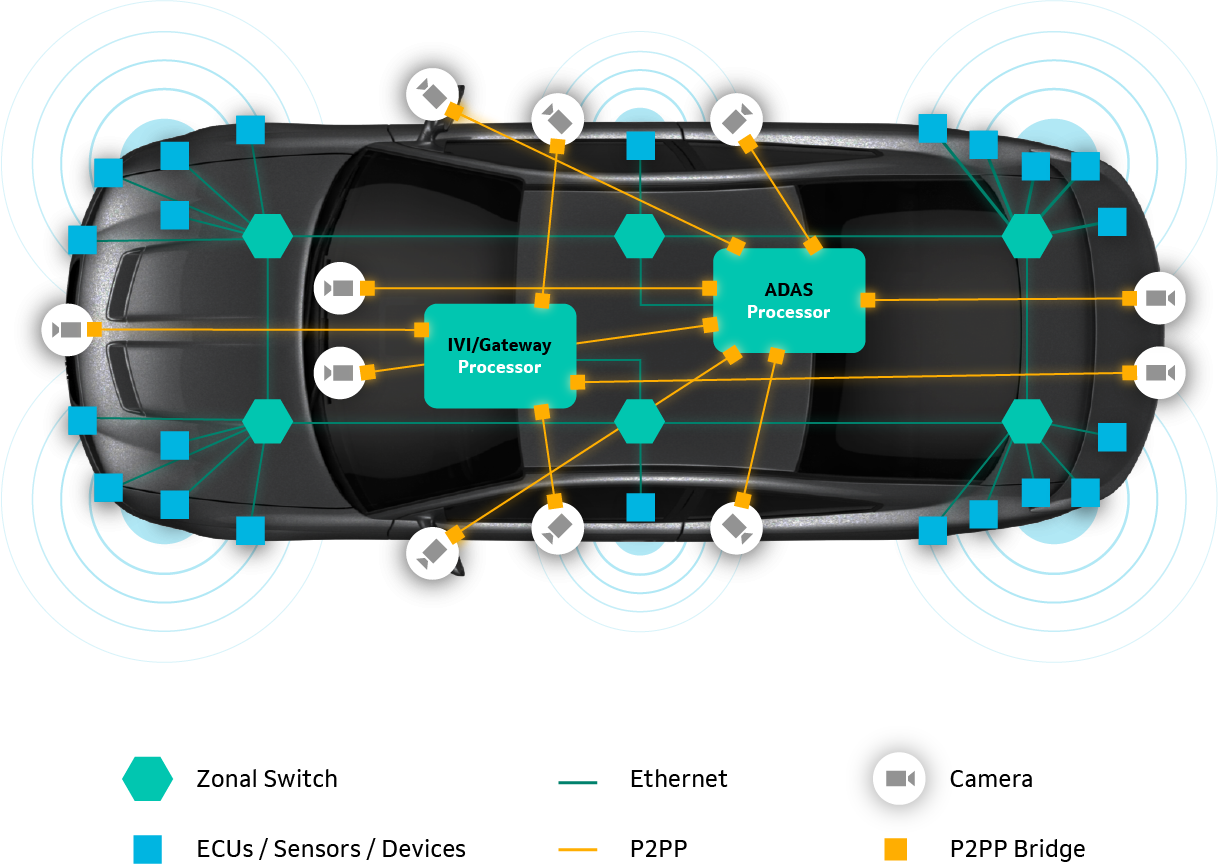
With Automotive Ethernet PHY speeds of 2.5, 5 and 10 Gbps (and future 25 Gbps), Ethernet can now support the data rates required by any vehicle camera link. Marvell has developed a new line of Ethernet camera bridge products to meet these requirements, thus eliminating the need for proprietary technologies in these applications, as shown in the diagram below.

The Ethernet camera bridge’s greatest advantage is that it’s based on the robust, mature Ethernet standard. The Ethernet PHY used in the camera bridge is a proven technology (2.5G/5G/10GBASE-T1 and soon 25GBASE-T1) with an expansive ecosystem of cables, connectors, and test facilities (e.g., compliance, interoperability, EMC) that have been widely accepted by the automotive industry for years.
But there’s more. With Ethernet as the underlying technology, these camera links can make use of the full range of IEEE Ethernet standards, such as:
- IEEE 802.1: Switching and virtualization
- IEEE 802.1AE: MACsec authentication and encryption
- IEEE 1588 PTP: Time-synchronization over network
- IEEE 802.3bu PoDL: Power over cable
- IEEE 802.1 AVB/TSN: Audio/video bridging
- IEEE 802.3az: Asymmetrical transmission, using Energy Efficient Ethernet protocol
- Support for all topologies: Mesh, star, ring, daisy-chain, point-to-point
These important features for automotive networks are covered in a previous Marvell blog, Ethernet Advanced Features for Automotive Applications.

The Rocket Is Ready for Launch
Proprietary protocols have characterized automotive networking for decades, and for good reason. Automotive Ethernet is changing that. Cameras, due to their quantity, resolution and associated data rate requirements have continued to rely on proprietary approaches even as other portions of the in-vehicle network have transitioned to Ethernet.
With the continued advances in Ethernet speeds, it’s clear that the era of proprietary automotive camera link protocols is ending. Before the end of the decade, numerous OEMs will have made the move from zonal architecture to end-to-end Ethernet architecture, with Ethernet-enabled cameras being just one of many software-defined vehicle functions.
Selected references:
Kirsten, Matheus (2021). Automotive Ethernet. Königseder, Thomas. Cambridge
Prof. Dr. Ing. Andreas Grzemba, (2011). MOST, the Automotive Multimedia Network. Franzis Verlag gmbH.
OPEN Alliance. "Open Alliance". opensig.org.
Peek, Jeff (21 October 2021). “Looking back: Rearview cameras have been around longer than you think”. Hagerty Media.
“History of CAN Technology”. CAN in Automation (CiA).
ISO 17458-5:2013: Road vehicles — FlexRay communications system — Part 5: Electrical physical layer conformance test specification.
Tags: Automotive Ethernet, Automotive Ethernet PHY, Ethernet Camera Bridge, Software-Defined Vehicles
Recent Posts
- Inside Marvell’s Expanding Custom Silicon Opportunity
- Welcome to the “OFC Film Festival”
- Canada’s Role in the AI Revolution
- Auto-Load Balancing and Teralynx 10: Optimizing Cloud and AI Infrastructure
- Microsoft Azure Cloud Opens Services with FIPS-certified Marvell LiquidSecurity HSMs for Public Preview